| |
External Cameras & A Mobile Robot: A Collaborative Surveillance System
-- Paper by Punarjay Chakravarty and Ray Jarvis accepted for publication at ACRA 2009
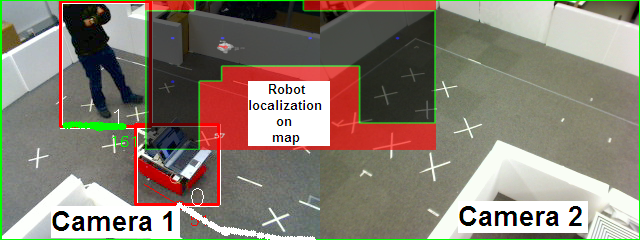
This video demonstrates intruder interception that is part of a system that surveils an indoor environment through the collaborative use of overhead cameras and a mobile robot. The robot is localized both in the image plane of the external camera and a ground plane map of its environment. This simultaneous localization is used to build up a homography between the image plane of each external camera and the ground plane. The video shows a mobile robot patrolling the environment. As it begins to move around, it performs global localization to ascertain its position on the ground plane. Soon as it comes into view of Camera 1. It continues to patrol through a series of pre-defined waypoints. Meanwhile, an intruder is tracked in camera 1. This information is passed on to the robot, which uses the homography matrix of camera 1 to determine the corresponding location on the ground plane. The Distance Transform algorithm is then used to plan a path from the robot's current location to the location of the intruder. This path is shown in white in the localization image. The robot turns around and approaches the intruder. As soon as the robot is close to the intruder, he turns away and goes to an other part of the environment, now visible from camera 2. He is tracked in the image plane of camera 2 and the system uses the homography matrix of this camera to infer his corresponding ground plane location. The robot now plans a path to this new location and proceeds to intercept the intruder at this new location.
This experiment demonstrates the ability of the robot to use its autonomously calculated homography to navigate to a person detected by the external cameras. The system is correctly able to track the intruder in either of the external cameras and use the calculated homography for the relevant camera to navigate the robot to him. When the intruder moves between cameras, the system is able to calculate a new ground plane position for him and redirect the robot there.
<-- See other IRRC Videos
<-- Return to IRRC Index
| |
|

