| Engineering home | Future students | Current students | Alumni | Partnerships | Staff (Intranet) | Contact Engineering |
| Research | Departments and schools | Staff directory | A-Z index | Site map |
| Engineering home | Future students | Current students | Alumni | Partnerships | Staff (Intranet) | Contact Engineering |
| Research | Departments and schools | Staff directory | A-Z index | Site map |
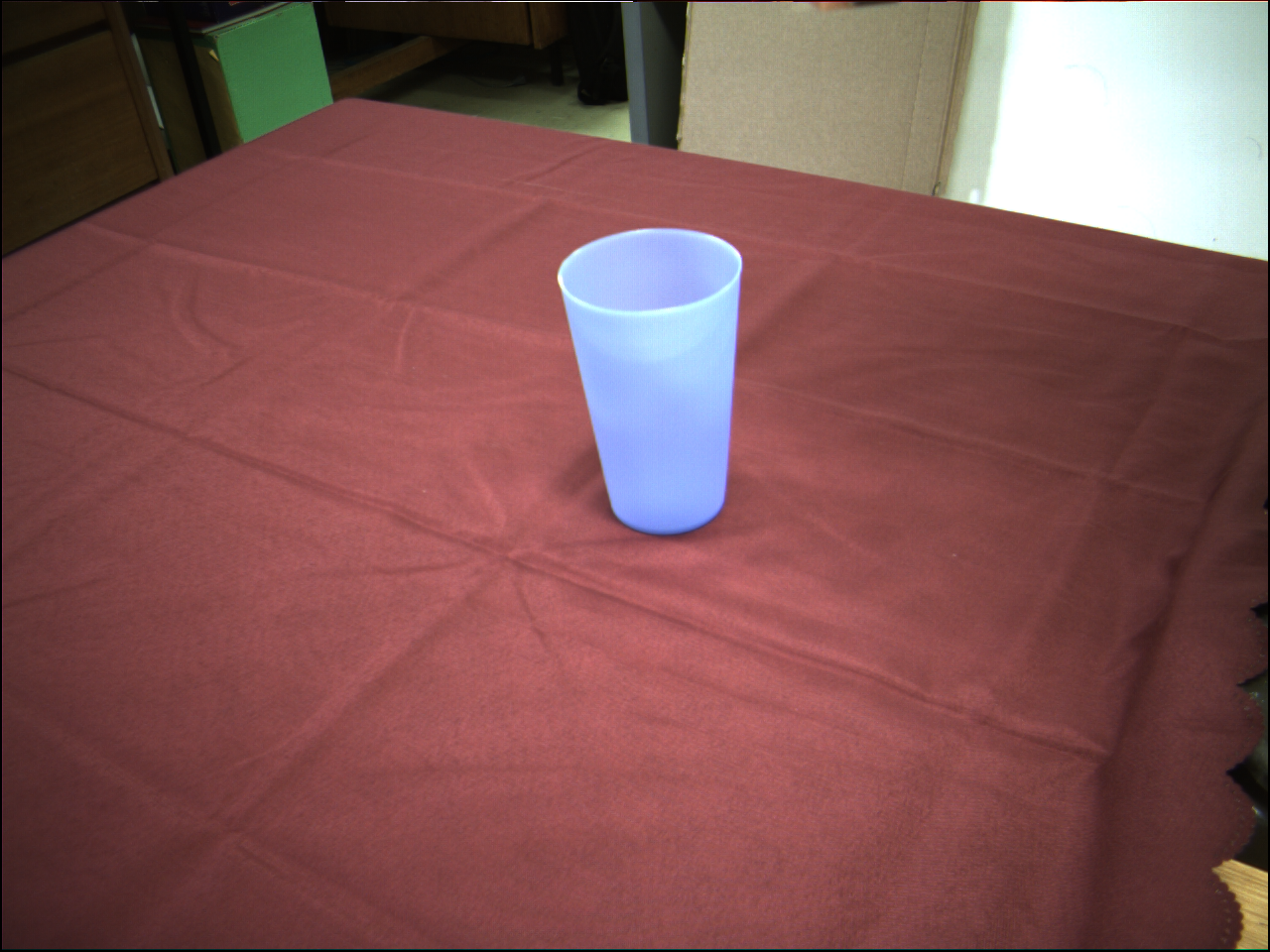
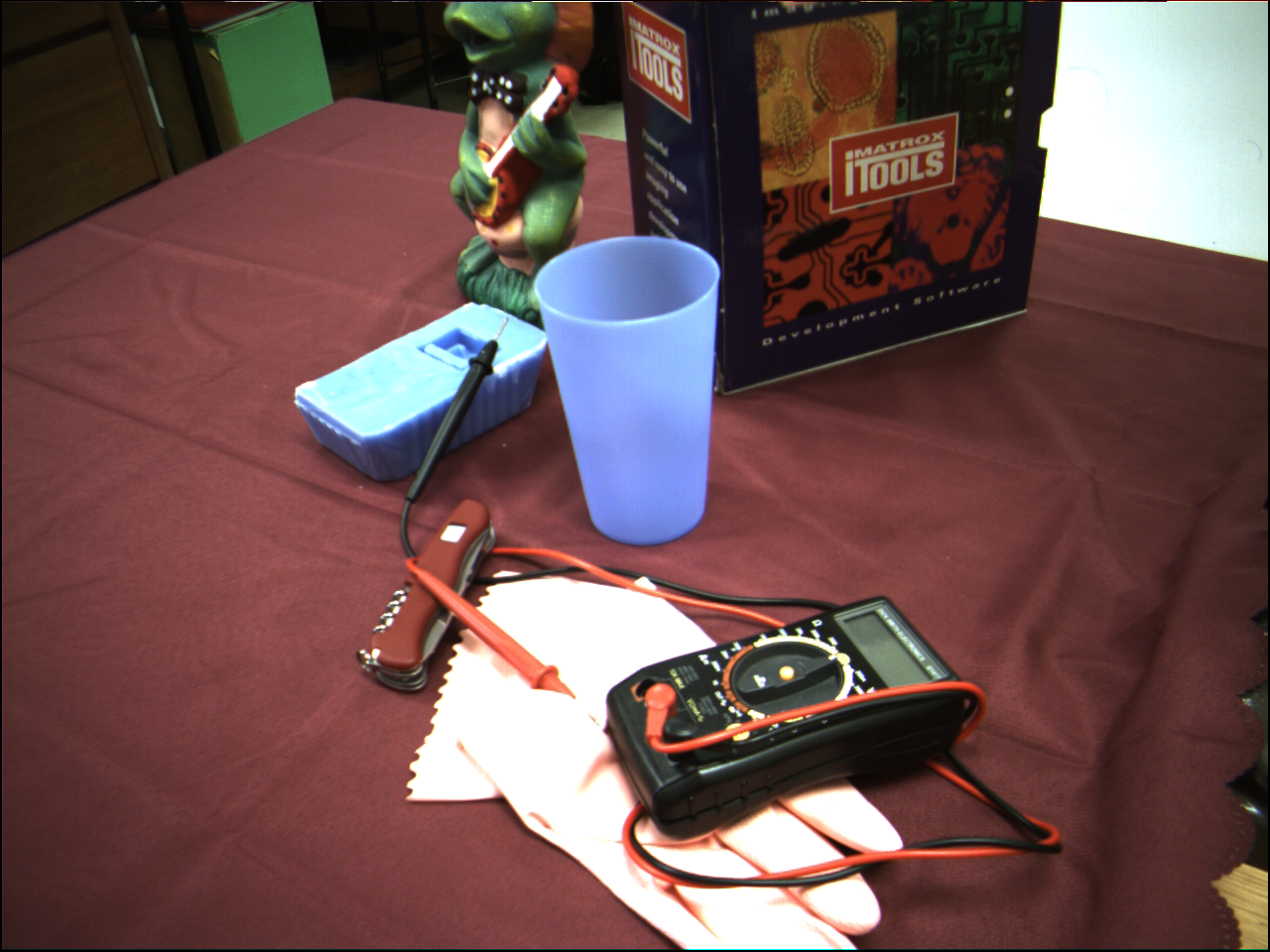
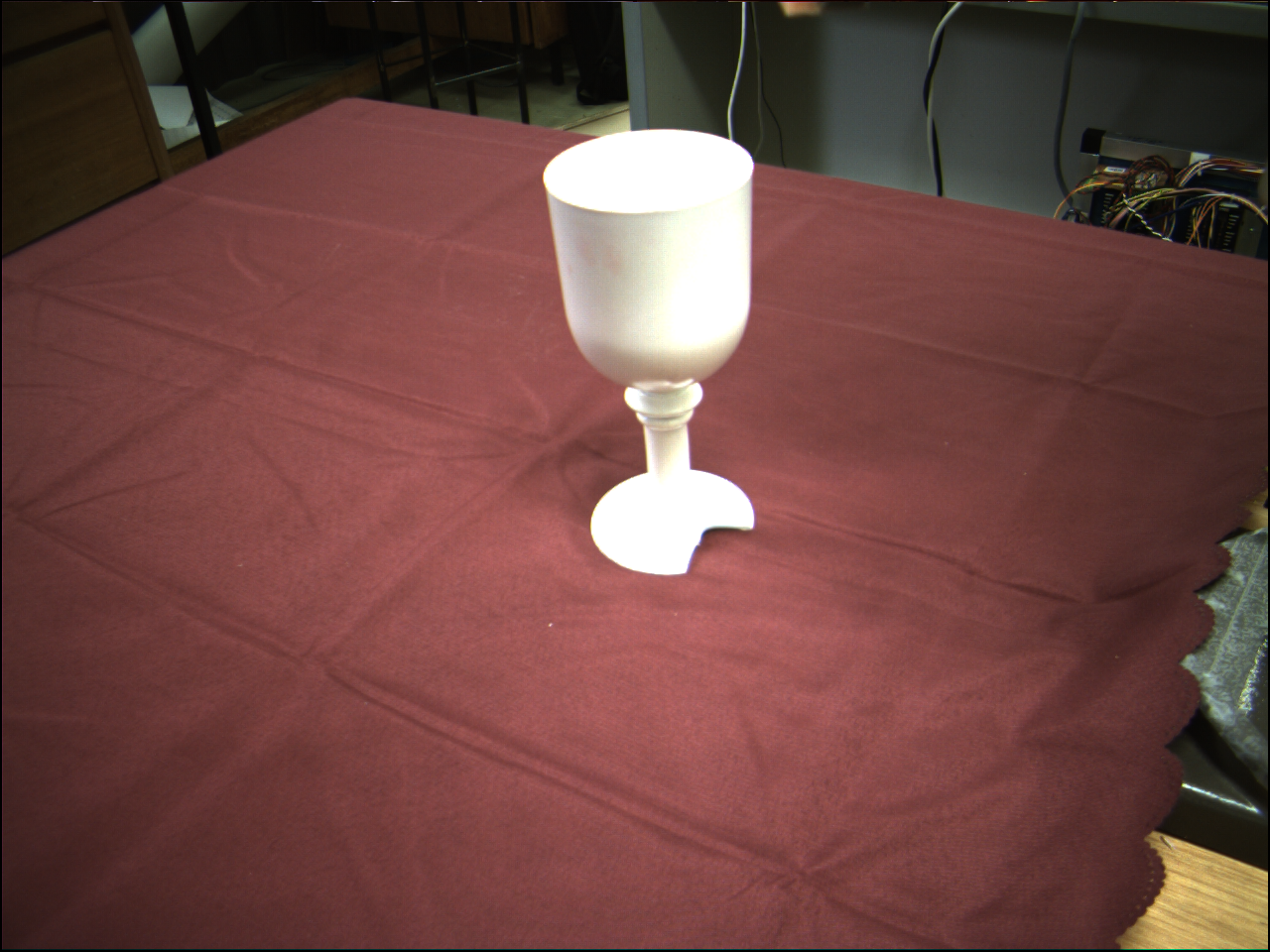
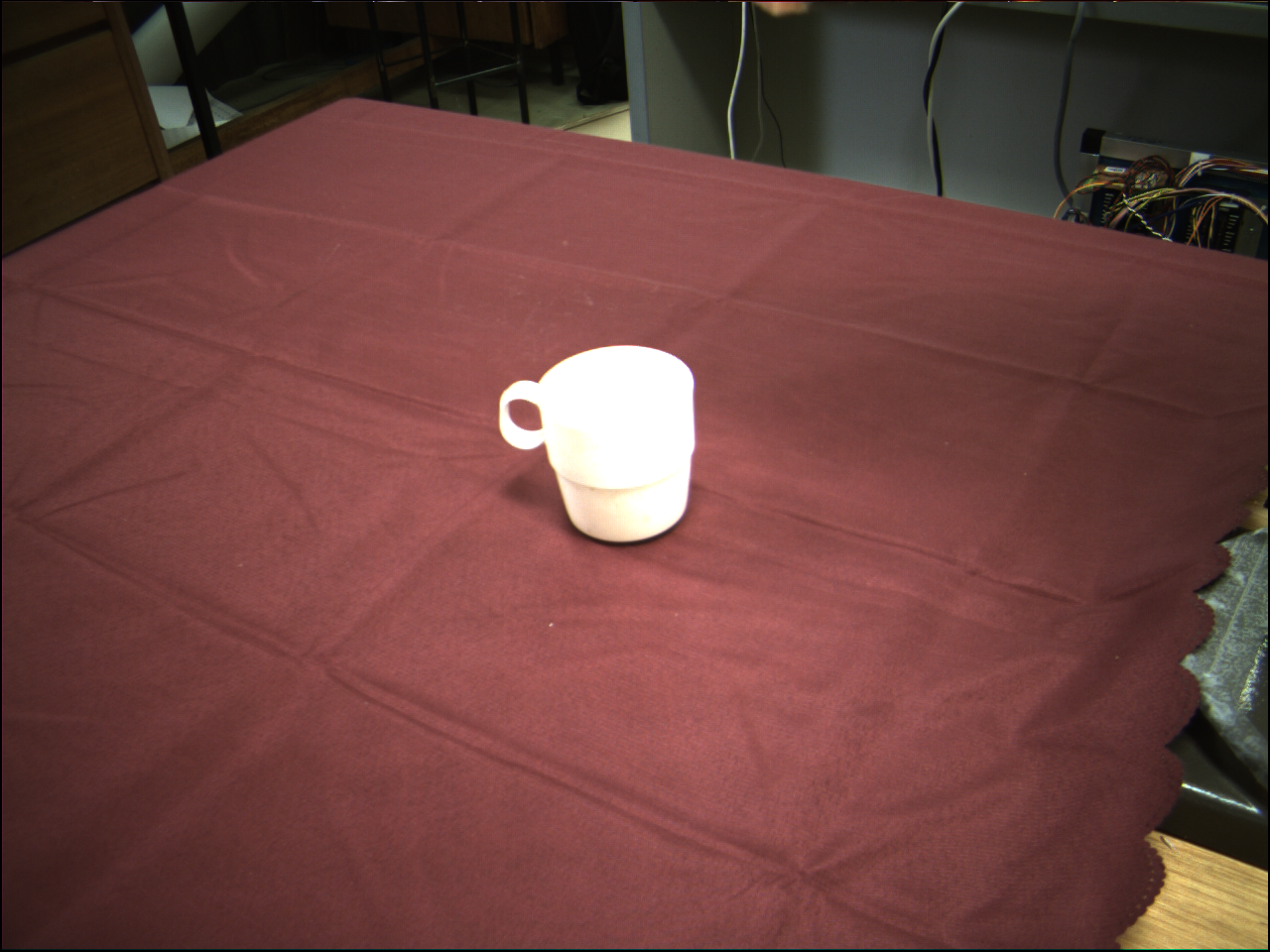
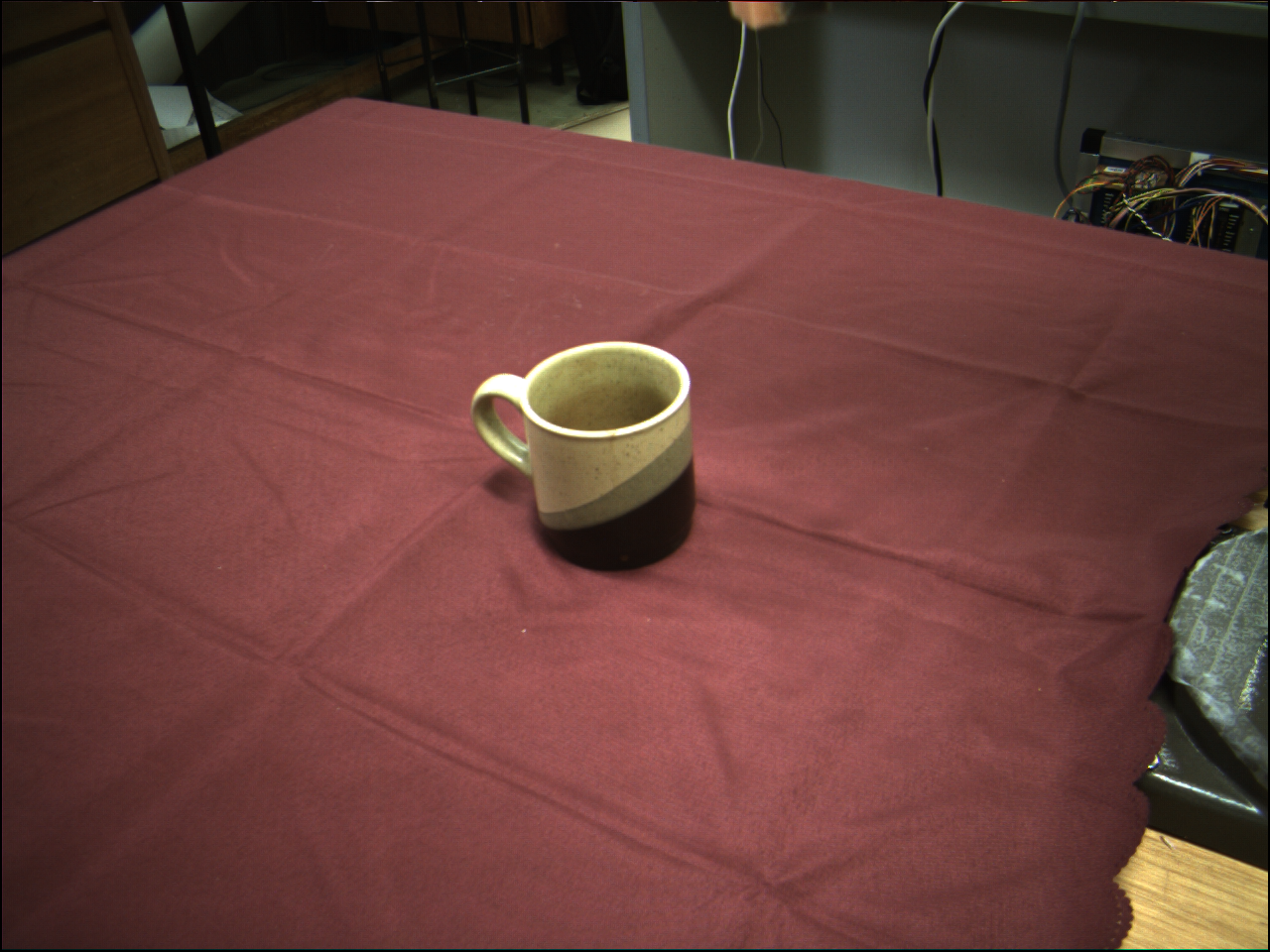
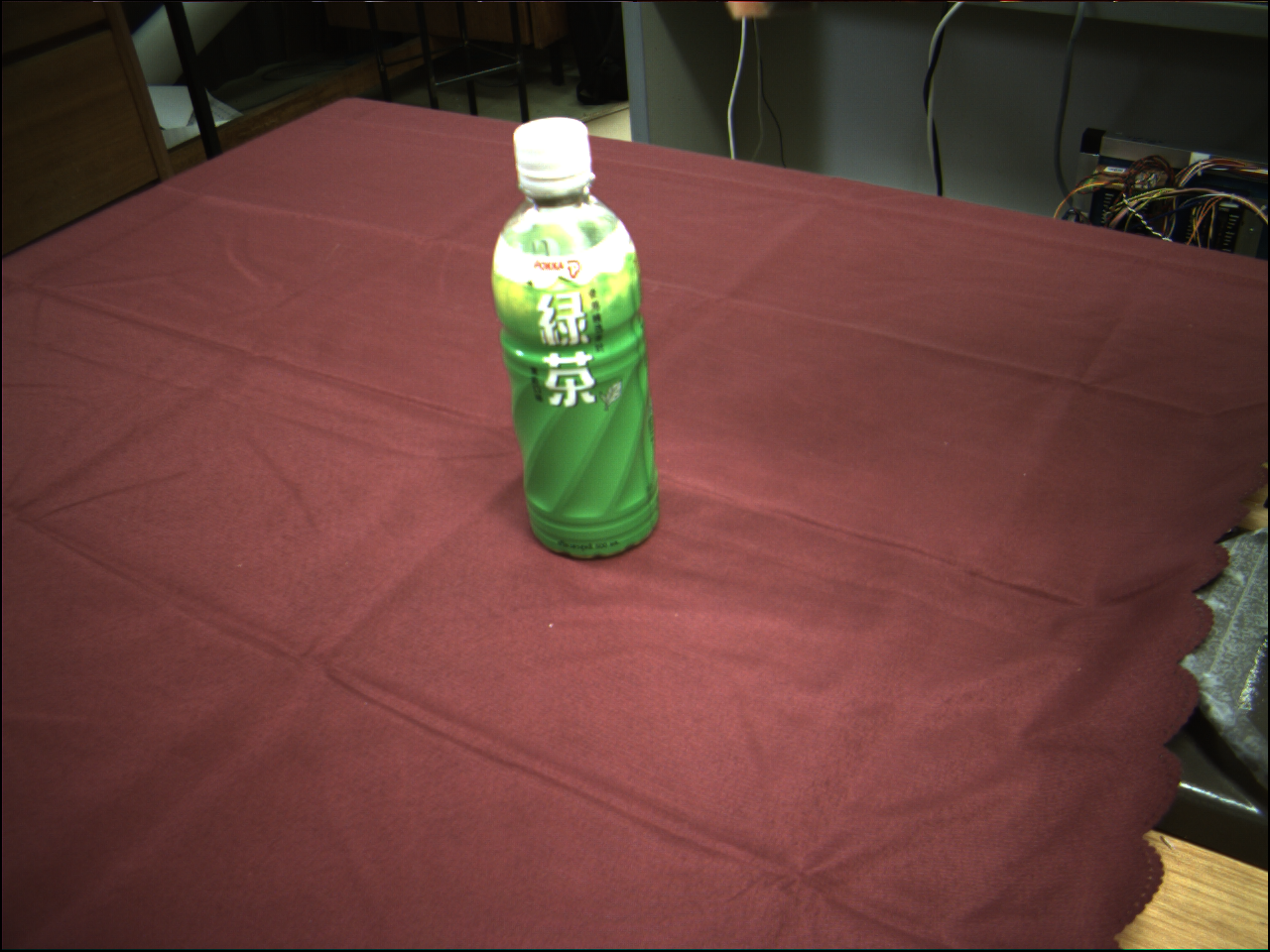
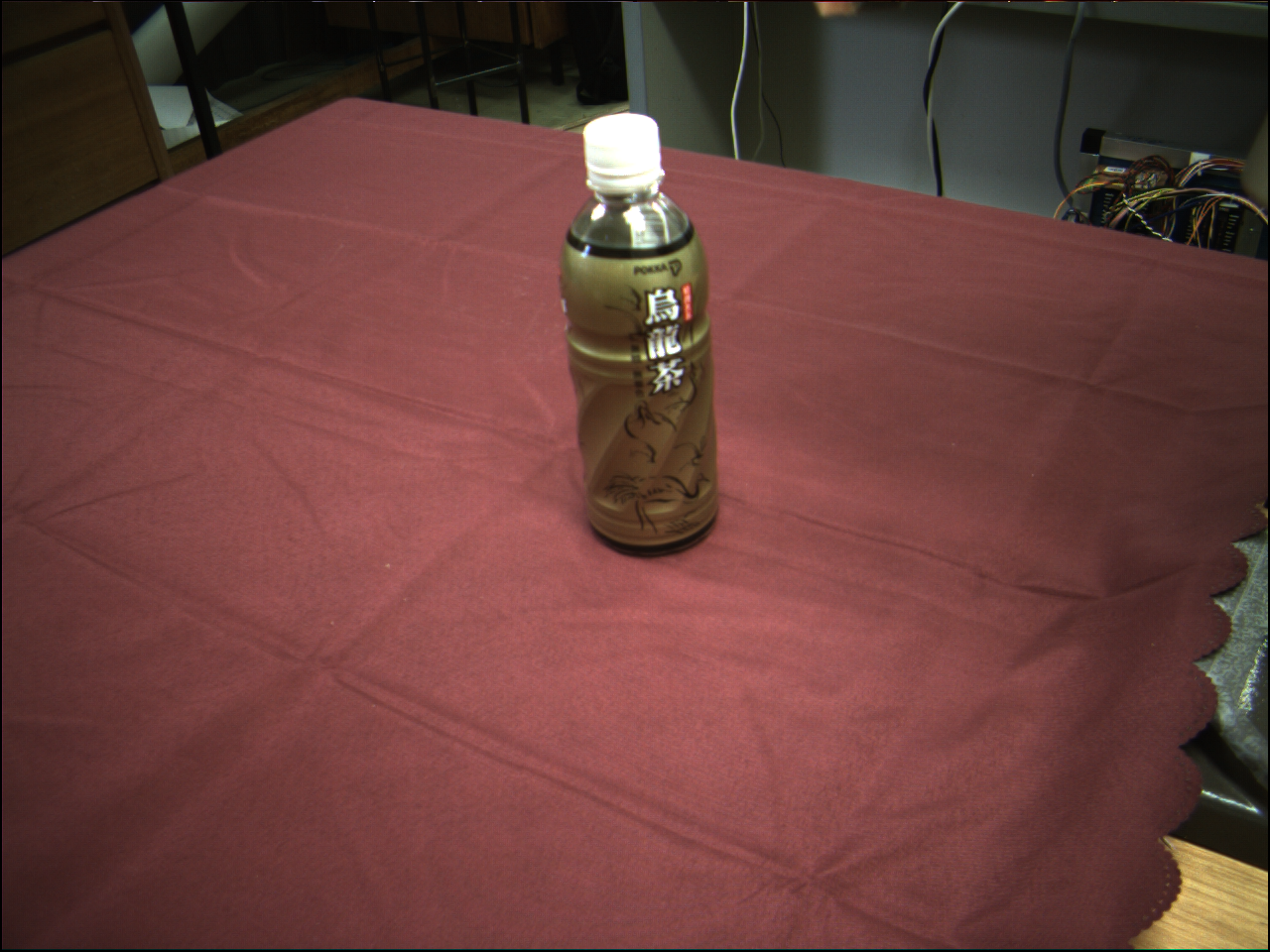
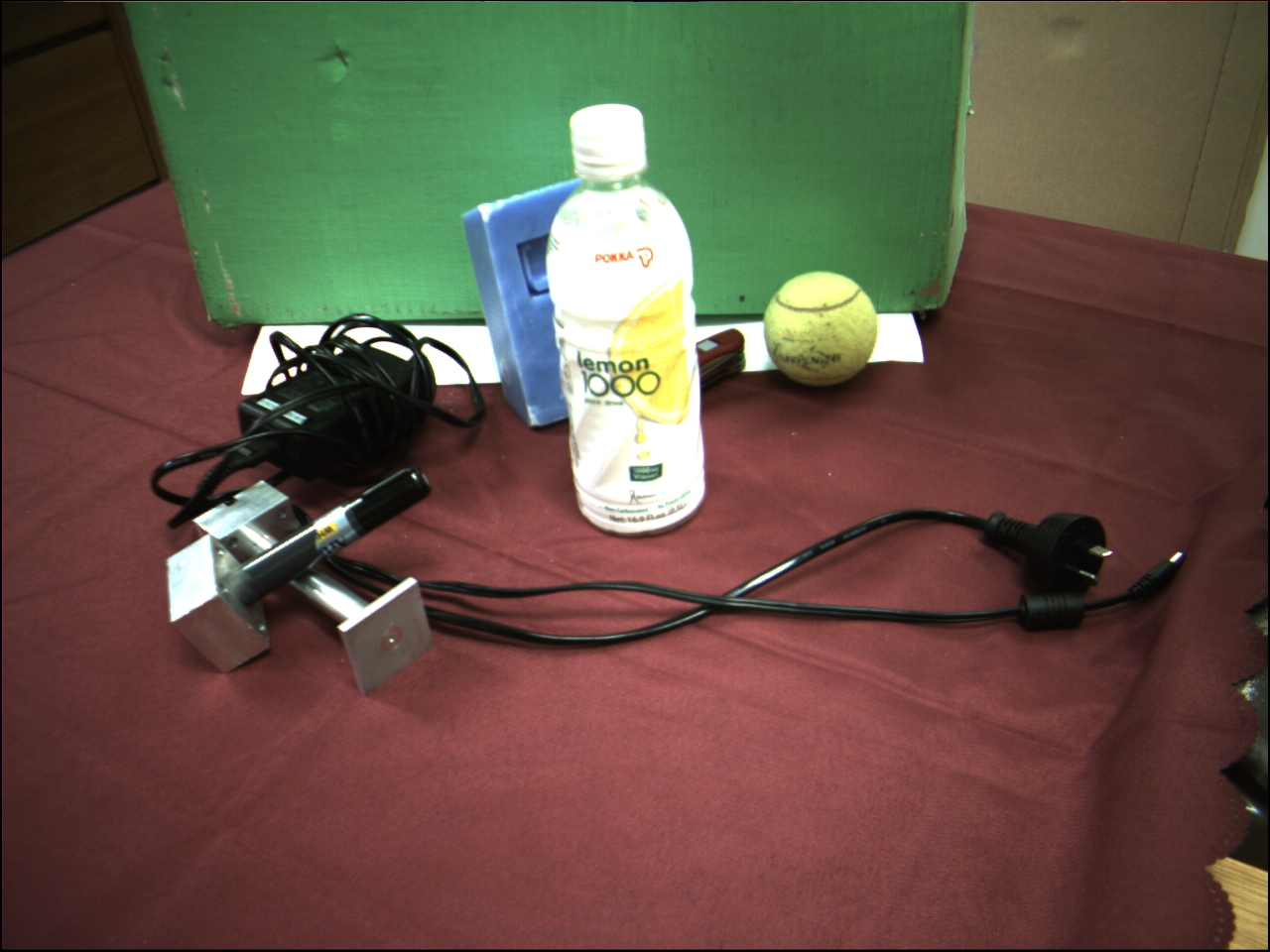
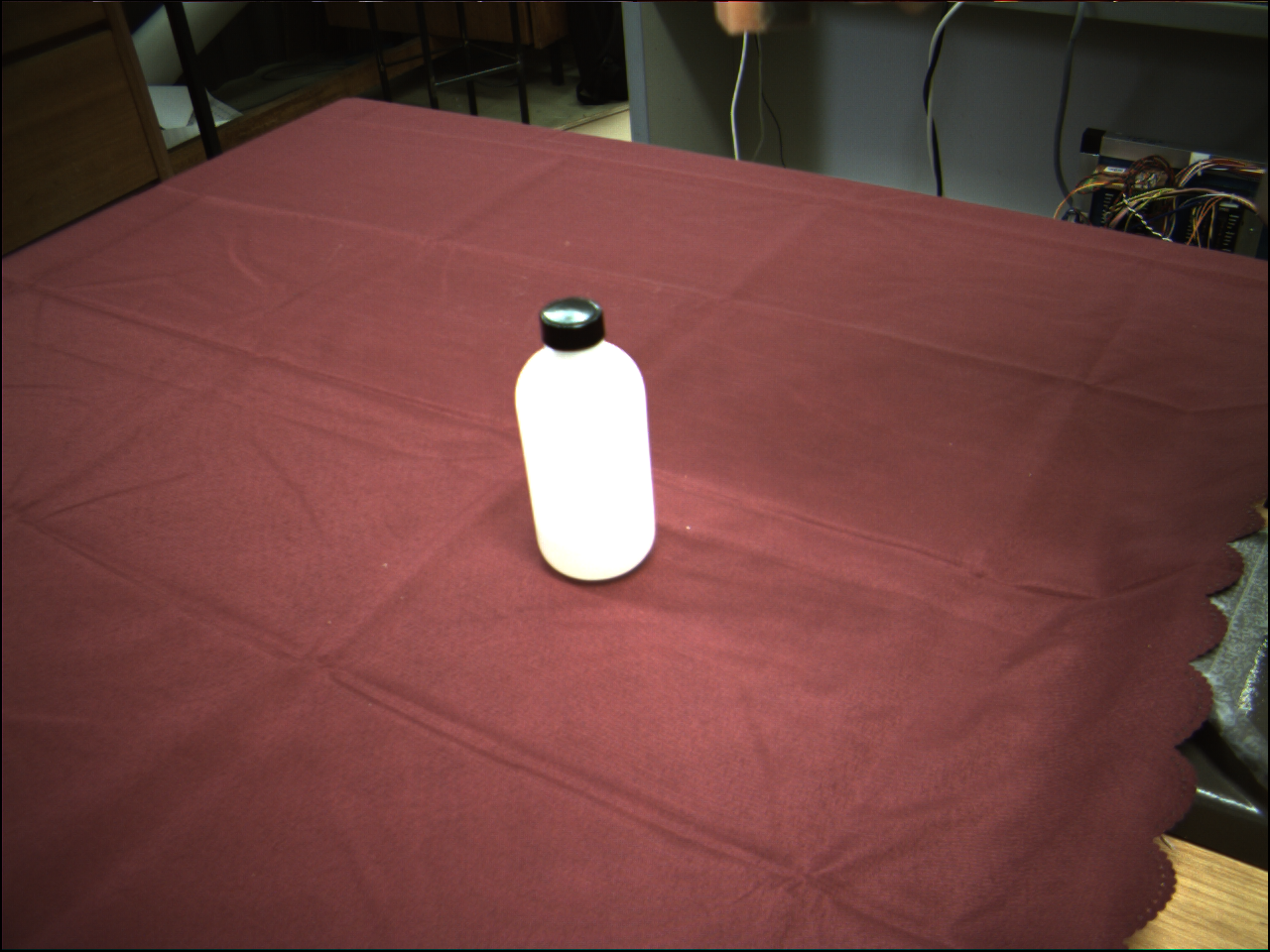
Autonomous Object Segmentation using the Robotic NudgeIROS 2008 conference paper details:Autonomous Segmentation of Near-Symmetric Objects using Vison and Robotic Nudging -- Paper by Wai Ho Li and Lindsay Kleeman The following table shows the autonomous segmentations our robot obtained autonomously through the application of a robotic nudge. The image of the scene and segmentations results are shown along side videos of the stereo tracking and robotic nudge. Click on the segmentation results to view the full resolution image.Stereo tracking videos are available individually for each camera. In the tracking videos, the symmetry line changes to red when object tracking is being conducted by our robot. Tracking starts automatically when sufficient object motion is detected. There is also a sporadic flicker in some tracking videos. This is due to a warning beacon which flashes a red light periodically when the robot manipulator is turned on. The robtic nuge videos are filmed using a separate HD camcorder. Note that due to limited HDV tape space, some robotic nudges were not filmed using the camcorder. All videos are encoded using the MPEG-4 codec. The robotic nudge videos are around 1MB in size. The tracking videos are roughly 400KB in size. If you are having video playback problems, try using the VLC player. It is an open source and cross platform player that can play nearly all existing video formats. Video playback maybe jerky for the robotic nudge videos due to their high resolution. If your browser decides to play the videos with a plugin, playback maybe scaled and choppy. Try saving the videos to your hard drive and playing them using a media player such as VLC.
<-- Return to IRRC Index If you have any comments or questions, please email Wai Ho Li: Wai.Li[at]eng.monash.edu.au (replace "[at]" with @) |
|