| Engineering home | Future students | Current students | Alumni | Partnerships | Staff (Intranet) | Contact Engineering |
| Research | Departments and schools | Staff directory | A-Z index | Site map |
| Engineering home | Future students | Current students | Alumni | Partnerships | Staff (Intranet) | Contact Engineering |
| Research | Departments and schools | Staff directory | A-Z index | Site map |
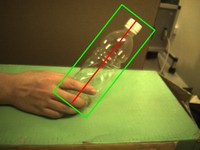
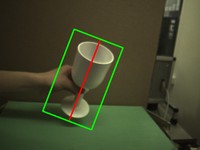
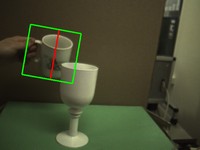
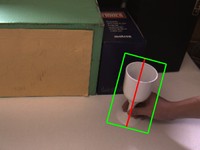
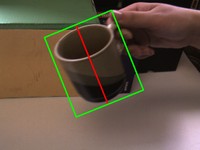
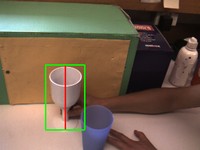
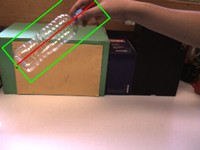
IROS 2006 VideosReal Time Object Tracking using Reflectional Symmetry and MotionPaper by Wai Ho Li and Lindsay KleemanThe following videos show tracking experiments where moving objects being tracked via their symmetry lines. In essence, the system tracks an object via its symmetry line and motion. A kalman filter is used to estimate the paramters of the symmetry line. The system does not use any a priori object models. The system can track transparent objects. It is robust against partial occlusions and will function under a variety of illumination conditions. A paper titled "Real Time Object Tracking using Reflectional Symmetry and Motion", authored by Wai Ho Li and Lindsay Kleeman, detailing this symmetry-based tracking system has been accepted into the IEEE/RSJ International Conference on Intelligent Robots and Systems 2006 (IROS 2006 Beijing).The video numbers are the same as those used in the IROS 2006 paper. The green rectangle is a rotated bounding box of an object's motion blocks. The symmetry line being tracked is shown in red. The bounding box may appear unstable or overly large. This does not mean the tracker has diverged, as the symmetry line, in red, is still being tracked successfully by the Kalman filter. These temporal jitters in the size and location of the bounding box are due to the fact that it is generated anew for every frame and its parameters are not tracked using the Kalman filter. Where appropriate, videos showing the symmetry line only are also provided, to improve the clarity of the tracking result. The tracking results are provided as WMV and H.264 videos. The x264 codec was used to encode the H.264 videos, which are of a higher quality than the WMV videos. VLC is an open source and cross platform player that can decode H.264 videos. If you wish to install a standalone H.264 decoder, FFDShow is an open source option. <-- See other IRRC Videos <-- Return to IRRC Index
<-- See other IRRC Videos <-- Return to IRRC Index If you have any comments or questions, please email Wai Ho Li: Wai.Li[at]eng.monash.edu.au (replace "[at]" with @) |
|